
Առանց խոզանակների շարժիչները էլեկտրական շարժիչների մի շարք են, որոնք, ի տարբերություն սովորական խոզանակի կամ ածուխի շարժիչների, առանց խոզանակի շարժիչներից ածուխի հեռացումը մեծացնում է այդ շարժիչների արդյունավետությունն ու երկարակեցությունը՝ համեմատած սովորական ածուխի շարժիչների հետ:
Շնորհիվ առանց խոզանակների շարժիչների բազմաթիվ առավելությունների՝ մեր բազմաթիվ գործիքներն օգտագործում են առանց խոզանակների շարժիչներ՝ ցանկացած իրավիճակում իրենց եզակի հզորությամբ ուղեկցելու համար: Ավելի երկար ծառայության ժամկետը, թեթև քաշը և ավելի քիչ աղմուկի արտադրությունը այն հատկանիշներից են, որոնք տարբերում են այս շարժիչները ածուխով աշխատող շարժիչներից:
Շարժիչները էներգիայի առաքման մեքենաներ են
Երբ ինժեներները բախվում են մեխանիկական առաջադրանքներ կատարելու համար էլեկտրական սարքավորումների նախագծման մարտահրավերին, նրանք կարող են մտածել, թե ինչպես են էլեկտրական ազդանշանները վերածվում էներգիայի: Այսպիսով, շարժիչները և շարժիչները այն սարքերից են, որոնք էլեկտրական ազդանշանները վերածում են շարժման: Շարժիչները էլեկտրական էներգիան փոխանակում են մեխանիկական էներգիայի:
Շարժիչի ամենապարզ տեսակը խոզանակով DC շարժիչն է: Այս տեսակի շարժիչներում էլեկտրական հոսանքն անցնում է կծիկներով, որոնք դասավորված են ֆիքսված մագնիսական դաշտում: Հոսանքն առաջացնում է մագնիսական դաշտեր կծիկներում; սա հանգեցնում է կծիկի հավաքման պտտմանը, քանի որ յուրաքանչյուր կծիկ դուրս է մղվում նմանատիպ բևեռից և քաշվում դեպի ֆիքսված դաշտի աննման բևեռը: Պտտումը պահպանելու համար անհրաժեշտ է շարունակաբար հակադարձել հոսանքը, այնպես, որ կծիկի բևեռականությունները շարունակաբար շրջվեն՝ պատճառ դառնալով, որ կծիկները շարունակեն «հետապնդել» ի տարբերություն ֆիքսված բևեռների: Կծիկներին հոսանք մատակարարվում է ֆիքսված հաղորդիչ խոզանակների միջոցով, որոնք շփում են պտտվող կոմուտատորի հետ. դա կոմուտատորի պտույտն է, որն առաջացնում է հոսանքի շրջադարձը կծիկներով: Կոմուտատորը և խոզանակները հիմնական բաղադրիչներն են, որոնք տարբերում են խոզանակով DC շարժիչը այլ շարժիչների տեսակներից: Նկար 1-ը ցույց է տալիս խոզանակով շարժիչի ընդհանուր սկզբունքը:
Նկար 1. Խոզանակով DC շարժիչի շահագործում:
Ֆիքսված խոզանակները էլեկտրական էներգիա են մատակարարում պտտվող կոմուտատորին: Երբ կոմուտատորը պտտվում է, այն անընդհատ շրջում է հոսանքի ուղղությունը դեպի ոլորուն՝ հակադարձելով կծիկի բևեռականությունները, որպեսզի պարույրները պահպանեն դեպի աջ պտույտը: Կոմուտատորը պտտվում է, քանի որ այն կցված է ռոտորին, որի վրա տեղադրված են կծիկները:
Շարժիչները տարբերվում են ըստ իրենց հզորության տեսակի (AC կամ DC) և ռոտացիայի առաջացման եղանակի (Նկար 2): Ստորև մենք համառոտ կանդրադառնանք յուրաքանչյուր տեսակի առանձնահատկություններին և օգտագործմանը: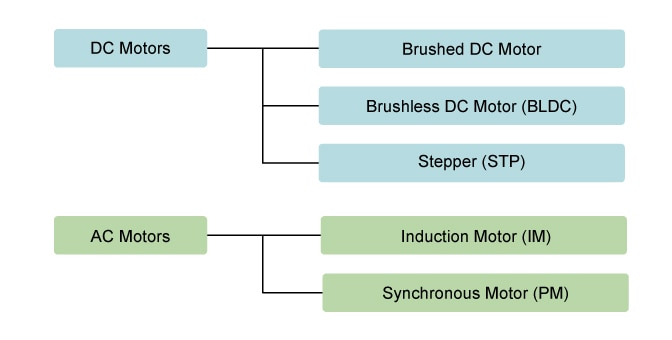
Տարբեր տեսակի շարժիչներ
Խոզանակով DC շարժիչները, որոնք ունեն պարզ դիզայն և հեշտ կառավարում, լայնորեն օգտագործվում են սկավառակի սկուտեղները բացելու և փակելու համար: Մեքենաներում դրանք հաճախ օգտագործվում են էլեկտրական էներգիայով աշխատող կողային պատուհանները քաշելու, երկարացնելու և տեղադրելու համար: Այս շարժիչների ցածր արժեքը նրանց հարմար է դարձնում բազմաթիվ օգտագործման համար: Այնուամենայնիվ, մի թերություն այն է, որ խոզանակները և փոխարկիչները հակված են համեմատաբար արագ մաշվել՝ իրենց շարունակական շփման արդյունքում, ինչը պահանջում է հաճախակի փոխարինում և պարբերական սպասարկում:
Քայլային շարժիչը շարժվում է իմպուլսներով. յուրաքանչյուր զարկերակով այն պտտվում է որոշակի անկյան (քայլի) միջով: Քանի որ ռոտացիան ճշգրտորեն վերահսկվում է ստացված իմպուլսների քանակով, այս շարժիչները լայնորեն օգտագործվում են դիրքային ճշգրտումներ իրականացնելու համար: Դրանք հաճախ օգտագործվում են, օրինակ, ֆաքսի մեքենաներում և տպիչներում թղթի սնուցումը վերահսկելու համար, քանի որ այս սարքերը թուղթ են սնուցում ֆիքսված քայլերով, որոնք հեշտությամբ փոխկապակցվում են իմպուլսների քանակի հետ: Դադարը կարող է նաև հեշտությամբ վերահսկվել, քանի որ շարժիչի ռոտացիան ակնթարթորեն դադարում է, երբ զարկերակային ազդանշանն ընդհատվում է:
Սինխրոն շարժիչներով ռոտացիան համաժամանակյա է մատակարարման հոսանքի հաճախականության հետ: Այս շարժիչները հաճախ օգտագործվում են միկրոալիքային վառարաններում պտտվող սկուտեղները վարելու համար. Շարժիչի ագրեգատի կրճատման մեխանիզմները կարող են օգտագործվել սննդի տաքացման համար համապատասխան պտտվող արագություններ ձեռք բերելու համար: Ինդուկցիոն շարժիչների դեպքում նույնպես պտտման արագությունը տատանվում է ըստ հաճախականության. բայց շարժումը համաժամանակյա չէ: Նախկինում այս շարժիչները հաճախ օգտագործվում էին էլեկտրական օդափոխիչների և լվացքի մեքենաների մեջ:
Ընդհանուր օգտագործման շարժիչների տարբեր տեսակներ կան: Այս նստաշրջանում մենք դիտարկում ենք առանց խոզանակի DC շարժիչների առավելություններն ու կիրառությունները:
Ինչու են BLDC շարժիչները պտտվում:
Ինչպես ենթադրում է նրանց անունը, առանց խոզանակի DC շարժիչները չեն օգտագործում խոզանակներ: Խոզանակով շարժիչներով խոզանակները հոսանք են փոխանցում կոմուտատորի միջոցով ռոտորի վրա գտնվող պարույրների մեջ: Այսպիսով, ինչպես է առանց խոզանակի շարժիչը հոսանք փոխանցում ռոտորային պարույրներին: Չկա, քանի որ կծիկները տեղադրված չեն ռոտորի վրա: Փոխարենը, ռոտորը մշտական մագնիս է. կծիկները չեն պտտվում, փոխարենը ամրացված են ստատորի վրա: Քանի որ կծիկները չեն շարժվում, վրձինների և կոմուտատորի կարիք չկա: (Տե՛ս Նկար 3):
Խոզանակով շարժիչով ռոտացիան ձեռք է բերվում ռոտորի կծիկների կողմից առաջացած մագնիսական դաշտերը վերահսկելու միջոցով, մինչդեռ անշարժ մագնիսներից առաջացած մագնիսական դաշտը մնում է ֆիքսված: Պտտման արագությունը փոխելու համար դուք փոխում եք պարույրների լարումը: BLDC շարժիչով դա մշտական մագնիս է, որը պտտվում է. ռոտացիան ձեռք է բերվում շրջակա անշարժ պարույրների կողմից առաջացած մագնիսական դաշտերի ուղղությունը փոխելով: Պտույտը վերահսկելու համար դուք կարգավորում եք հոսանքի մեծությունն ու ուղղությունը այս կծիկների մեջ:
Քանի որ ռոտորը մշտական մագնիս է, այն հոսանքի կարիք չունի՝ վերացնելով խոզանակների և կոմուտատորի կարիքը: Հոսանքը դեպի ֆիքսված կծիկներ վերահսկվում է դրսից:
BLDC Motors-ի առավելությունները
Ստատորի վրա երեք կծիկ ունեցող BLDC շարժիչը կունենա վեց էլեկտրական լարեր (յուրաքանչյուր կծիկի վրա երկուական), որոնք տարածվում են այս կծիկներից: Իրականացումների մեծ մասում այս լարերից երեքը կմիացվեն ներսից, իսկ մնացած երեք լարերը ձգվում են շարժիչի մարմնից (ի տարբերություն վերևում նկարագրված խոզանակով շարժիչից ձգվող երկու լարերի): BLDC շարժիչի պատյանում լարերի միացումն ավելի բարդ է, քան պարզապես հոսանքի բջիջի դրական և բացասական տերմինալները միացնելը. մենք ավելի մանրամասն կանդրադառնանք, թե ինչպես են այս շարժիչները աշխատում այս շարքի երկրորդ նիստում: Ստորև մենք եզրակացնում ենք՝ դիտարկելով BLDC շարժիչների առավելությունները:
Մի մեծ առավելություն է արդյունավետությունը, քանի որ այս շարժիչները կարող են շարունակաբար կառավարել առավելագույն պտտվող ուժը (ոլորող մոմենտ): Խոզանակով շարժիչները, ի հակադրություն, հասնում են առավելագույն ոլորող մոմենտների միայն պտտման որոշակի կետերում: Որպեսզի խոզանակով շարժիչն ապահովի նույն ոլորող մոմենտը, ինչ առանց խոզանակների մոդելը, այն պետք է օգտագործի ավելի մեծ մագնիսներ: Ահա թե ինչու նույնիսկ փոքր BLDC շարժիչները կարող են զգալի հզորություն ապահովել:
Երկրորդ մեծ առավելությունը՝ առաջինի հետ կապված, կառավարելիությունն է: BLDC շարժիչները կարող են կառավարվել՝ օգտագործելով հետադարձ կապի մեխանիզմները, ճշգրիտ ցանկալի ոլորող մոմենտ ստեղծելու և պտտման արագությունը: Ճշգրիտ կառավարումն իր հերթին նվազեցնում է էներգիայի սպառումը և ջերմության արտադրությունը, իսկ այն դեպքերում, երբ շարժիչները մարտկոցով են աշխատում, երկարացնում է մարտկոցի կյանքը:
BLDC շարժիչները նաև ապահովում են բարձր ամրություն և ցածր էլեկտրական աղմուկի առաջացում՝ խոզանակների բացակայության պատճառով: Խոզանակով շարժիչների դեպքում խոզանակները և կոմուտատորը մաշվում են շարունակական շարժվող շփման արդյունքում, ինչպես նաև առաջանում են կայծեր, որտեղ շփումը կատարվում է: Էլեկտրական աղմուկը, մասնավորապես, ուժեղ կայծերի արդյունք է, որոնք հակված են առաջանալ այն հատվածներում, որտեղ խոզանակներն անցնում են կոմուտատորի բացերի վրայով: Ահա թե ինչու BLDC շարժիչները հաճախ նախընտրելի են համարվում այն ծրագրերում, որտեղ կարևոր է խուսափել էլեկտրական աղմուկից:
Իդեալական հավելվածներ BLDC շարժիչների համար
Մենք տեսանք, որ BLDC շարժիչներն առաջարկում են բարձր արդյունավետություն և կառավարելիություն, և որ նրանք ունեն երկար աշխատանքային կյանք: Այսպիսով, ինչի՞ համար են դրանք լավ: Իրենց արդյունավետության և երկարակեցության պատճառով դրանք լայնորեն օգտագործվում են անընդհատ աշխատող սարքերում: Նրանք վաղուց օգտագործվել են լվացքի մեքենաների, օդորակիչների և այլ սպառողական էլեկտրոնիկայի մեջ. իսկ վերջերս նրանք հայտնվում են երկրպագուների մեջ, որտեղ նրանց բարձր արդյունավետությունը նպաստել է էներգիայի սպառման զգալի կրճատմանը:
Դրանք օգտագործվում են նաև վակուումային մեքենաներ վարելու համար։ Մի դեպքում, կառավարման ծրագրի փոփոխությունը հանգեցրեց պտտման արագության մեծ թռիչքի, ինչը այս շարժիչների կողմից առաջարկվող գերազանց կառավարելիության օրինակ է:
BLDC շարժիչները օգտագործվում են նաև կոշտ սկավառակների սկավառակները պտտելու համար, որտեղ դրանց երկարակեցությունը ապահովում է սկավառակների հուսալի աշխատանքը երկարաժամկետ հեռանկարում, մինչդեռ դրանց էներգիայի արդյունավետությունը նպաստում է էներգիայի կրճատմանը մի տարածքում, որտեղ դա ավելի ու ավելի կարևոր է դառնում:
Դեպի ավելի լայն կիրառություն ապագայում
Մենք կարող ենք ակնկալել, որ ապագայում կտեսնենք BLDC շարժիչներ, որոնք կօգտագործվեն կիրառությունների ավելի լայն շրջանակում: Օրինակ, դրանք հավանաբար լայնորեն կօգտագործվեն սպասարկող ռոբոտներ վարելու համար՝ փոքր ռոբոտներ, որոնք ծառայություններ են մատուցում այլ ոլորտներում, բացի արտադրությունից: Կարելի է մտածել, որ քայլային շարժիչները ավելի հարմար կլինեն այս տեսակի կիրառման համար, որտեղ իմպուլսները կարող են օգտագործվել ճշգրիտ վերահսկելու դիրքավորումը: Բայց BLDC շարժիչներն ավելի հարմար են ուժը վերահսկելու համար: Իսկ քայլային շարժիչի դեպքում այնպիսի կառույցի դիրքը պահելը, ինչպիսին է ռոբոտի թեւը, կպահանջի համեմատաբար մեծ և շարունակական հոսանք: BLDC շարժիչով, այն ամենը, ինչ կպահանջվի, արտաքին ուժին համաչափ հոսանք է, որը թույլ է տալիս ավելի արդյունավետ կառավարում: BLDC շարժիչները կարող են նաև փոխարինել պարզ խոզանակով հոսանքի շարժիչներին գոլֆի և շարժական սայլակների մեջ: Բացի իրենց ավելի լավ արդյունավետությունից, BLDC շարժիչները կարող են նաև ապահովել ավելի ճշգրիտ կառավարում, որն իր հերթին կարող է ավելի երկարացնել մարտկոցի կյանքը:
BLDC շարժիչները նույնպես իդեալական են դրոնների համար: Ճշգրիտ կառավարում ապահովելու նրանց կարողությունը դրանք հատկապես հարմար է բազմապրոտոր անօդաչու սարքերի համար, որտեղ անօդաչու թռչող սարքի դիրքը վերահսկվում է յուրաքանչյուր ռոտորի պտտման արագությունը ճշգրիտ վերահսկելու միջոցով:
Այս նիստում մենք տեսանք, թե ինչպես են BLDC շարժիչներն առաջարկում գերազանց արդյունավետություն, կառավարելիություն և երկարակեցություն: Սակայն զգույշ և պատշաճ վերահսկողությունը կարևոր է այս շարժիչների ներուժից լիարժեք օգտվելու համար: Մեր հաջորդ նիստում մենք կանդրադառնանք, թե ինչպես են աշխատում այս շարժիչները:
Հրապարակման ժամանակը՝ օգոստոսի 21-2023